Summary:
The use of reduced-order electrochemical models creates opportunities for battery management systems to control the battery behavior by monitoring the internal states in electrochemical processes, which are critical for safety enhancement and degradation mitigation. This poster explores a state observer for lithium-ion batteries based on an extended single-particle model, which results in a trade-off between high accuracy and low computational burden, thus enables the real-time application. An adaptive unscented Kalman filter based on this model is developed to estimate not only the state of charge but also lithium-ion concentrations and potentials, which precisely describe battery internal behaviors to avoid lithium plating. Experimental tests are carried out with a lithium-ion battery cell for both model and state estimation validations. Furthermore, the estimation accuracies of the unmeasurable states are also verified by numerical validation tests with a high-fidelity electrochemical model. All estimated states present fast convergence, robustness, and high accuracy despite a 20% initial state-of-charge error. Additionally, the enhancement in the state estimation accuracy and robustness by a noise adaption step is demonstrated by an application-relevant evaluation framework, considering sensor noise, state uncertainty, parameter uncertainty, and computation time.
Several highlights of this work are given below:
• An accurate, computationally efficient eSPM is used in the state observer, which results in 99% reduced computation time compared to the COMSOL model.
• Not only the battery SOC but also the internal states, including solid phase surface concentrations in both electrodes, electrolyte concentration and side reaction overpotential, are estimated by the proposed method.
• Experimental and numerical validation tests are performed with a commercial NMC pouch cell and a full-order COMSOL model under profiles with different dynamics to verify the high accuracy of the model and the estimations of both measurable and unmeasurable states.
• Both experimental and numerical validations indicate fast convergences and high accuracies in all estimated states under a 20% initial SOC error, which shows the robustness of the AUKF.
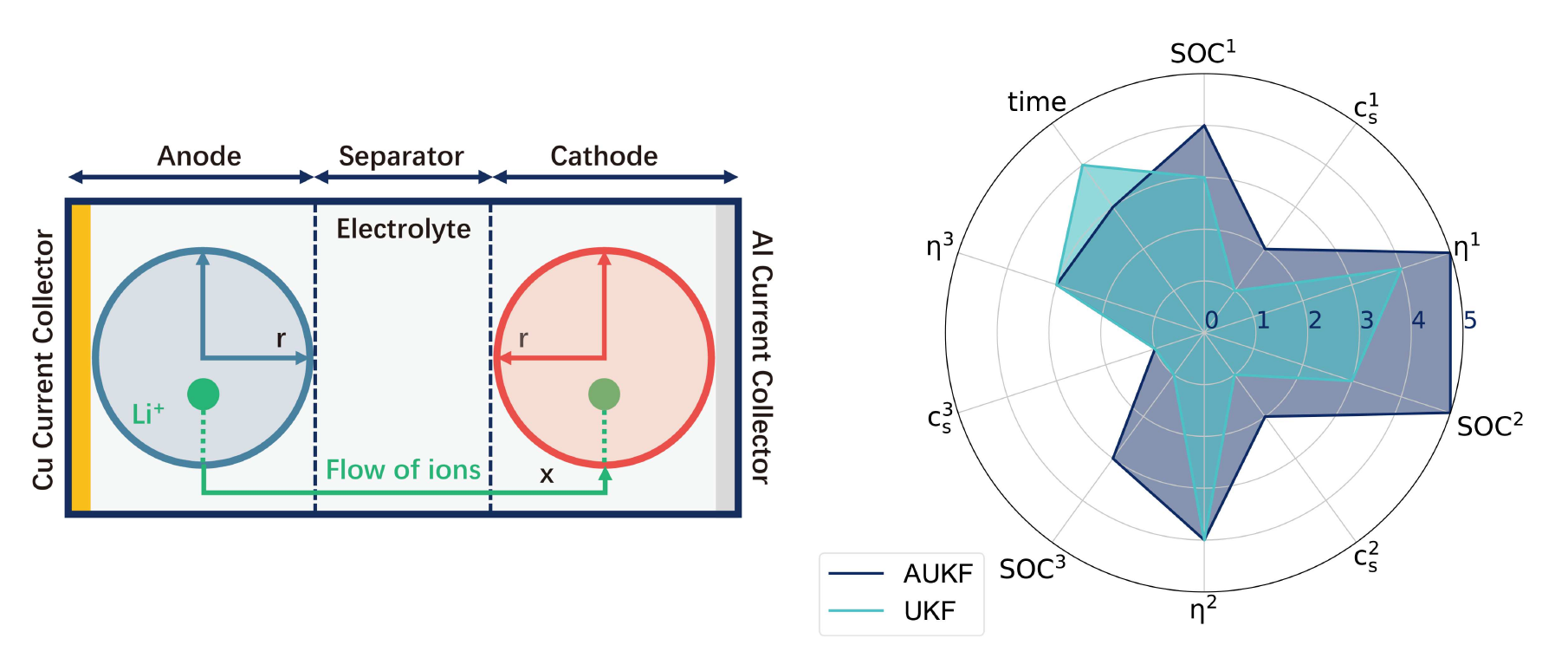
• A framework of evaluating EM-based state observers is proposed and a comparative study between the UKF and the AUKF algorithm is carried out to validate the enhanced performance by noise covariance adjustments, according to the estimation accuracies of SOC, solid-phase surface concentration in the anode, and side reaction overpotential.
• Compared to the UKF algorithm, the AUKF algorithm shows higher estimation accuracies of all three states under sensor noise, state uncertainty, and parameter uncertainties, though at the cost of a higher computational time.
We are happy to forward your request / feedback.